


















2019年6月12日
ポイント
●オオクモヒトデがからだを風船のようにしぼませたり膨らませたりする現象を発見。
●5本腕と6本腕の個体で,パーツ間の同期のパターンが異なることを発見。
●水の流れを想定した数理モデルから,神経回路に頼らない協調運動の理解に貢献。
概要
北海道大学大学院生命科学院博士課程の脇田大輝氏,広島大学大学院理学院の早瀬友美乃研究員,北海道大学電子科学研究所の青沼仁志准教授の研究グループは,オオクモヒトデというヒトデに似た動物が,からだを風船のようにしぼませたり膨らませたりする協調運動「ポンピング」をし,パーツ間の同期のパターンが5本腕と6本腕の個体で異なることを発見しました。
ポンピングは「生きた動物で,明らかに異なるからだの形が,明らかに異なる動きの協調を作っている」好例です。動物の動きを協調させるネットワークとして,神経回路が注目されてきましたが,研究グループはパーツ間に神経系を想定せず,水流のはたらきでポンピングの協調運動が成り立つことを,数式を使って説明することに成功しました。
本研究は,「からだの形そのものをうまく利用して,ある動きを協調させる」という動物の知恵をピックアップした研究で,複雑なコントロールなしに協調的なリズムを生み出す設計論として,ロボット工学への貢献が期待されます。
なお,本研究成果は,2019年6月5日(水)公開のScientific Reports誌に掲載されました。
詳細はこちら
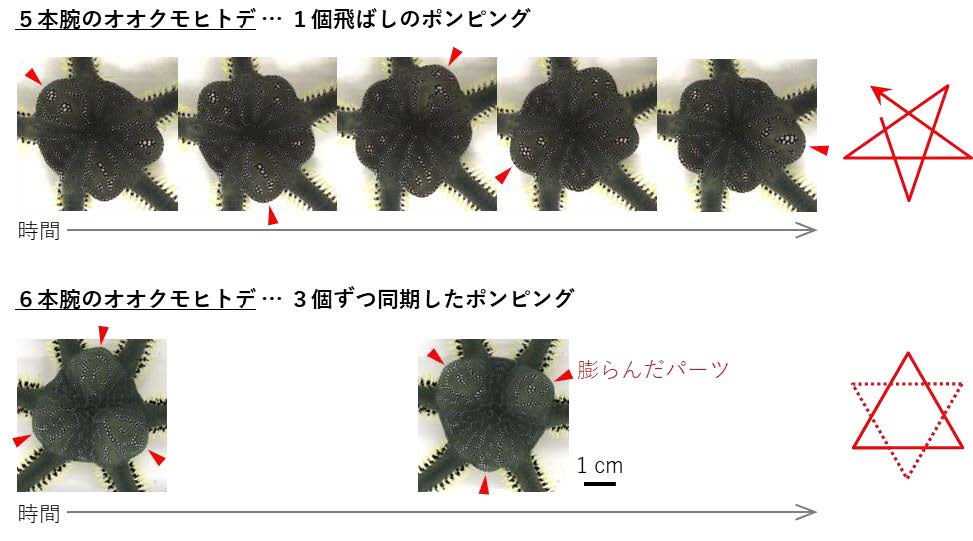
オオクモヒトデのポンピングの様子

