


















2020年1月8日
ポイント
●4~7本の腕をもつクモヒトデの逃避行動から,肢の数にとらわれない「歩き方」を解明。
●前後左右のない動物が進行方向を決めるからくりを解明。
●全方位移動ロボットへの応用に期待。
概要
北海道大学大学院生命科学院博士課程の脇田大輝氏,京都大学白眉センターの加賀谷勝史特任助教,北海道大学電子科学研究所の青沼仁志准教授の研究グループは,クモヒトデの逃避行動に着目し,放射相称の身体をもつ動物が前後左右を決めるからくりを解き明かしました。
クモヒトデの一種であるOphiactis brachyaspisは星形の身体をもち,その腕の数には4~7本といった個体差があります。研究グループは,クモヒトデの腕の先端に触って逃避行動を誘発し,腕の数の異なる個体がそれぞれどのように腕を使って移動するのかを調べました。その結果,クモヒトデは触られた腕から左回りまたは右回りに「二つ隣」の腕の方向へ逃げる傾向があること,また,そのときに先頭になる腕の両隣の腕を同時に動かして漕ぐ傾向があることを数理モデルを使って明らかにしました。
本研究成果は,「なぜ肢の数が違っても大丈夫なのか?」「前後左右のない動物がどのように『前』を決めるのか?」という疑問に答えたものであり,全方位移動ロボット設計への応用が期待されます。
なお,本研究成果は,生物学と数学の融合研究として2020年1月8日(水)公開のJournal of the Royal Society Interface誌に掲載されました。
詳細はこちら
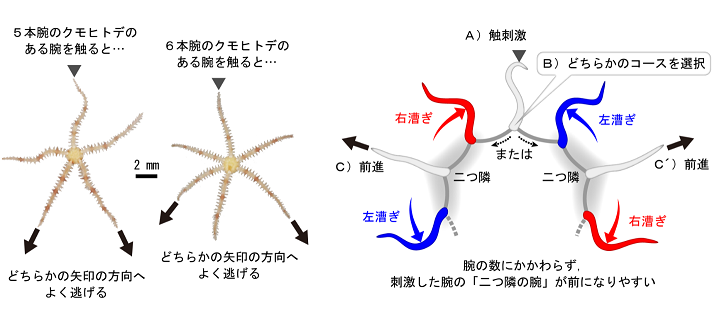
チビクモヒトデ科の一種Ophiactis brachyaspisの逃避行動(左)と腕数を一般化した模式図(右)

