


















2022年2月25日
ポイント
●コオロギは,逃げる際に触角で障害物を検知すると,衝突を避けるように進路を変えることを発見。
●片方の触角だけでも,障害物の縁を検出し,衝突回避できることを発見。
●コオロギは触角で周囲の空間を認識し,それをもとに将来の進路を調節する能力を持つことを示唆。
概要
北海道大学大学院理学研究院の小川宏人教授らの研究グループは,物体を触角で触っているコオロギの逃避行動を詳細に観察して,昆虫が周囲の空間を認識していることを明らかにしました。
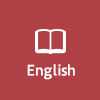
動物は様々な感覚器官によって外界を知覚します。特に空間情報を得るためには視覚が用いられることが多いですが,夜行性や暗所を好む動物の場合,機械感覚(体性感覚)が使われます。例えば昆虫は頭部の触角(アンテナ)を積極的に動かして周囲の物体を知覚します。しかしこれまでの研究では,昆虫が触角を用いて周囲を「認識」しているかは不明でした。なぜなら周囲の空間全体を認識しなくても,触角への刺激に対して一定の関係性をもって反応すれば,触角を使う行動は説明できるからです。研究グループは,球形のトレッドミル上にコオロギを保持し,その前や横に様々な物体を置いて触角で触らせた状態で短い気流刺激を与え,それによって生じる逃避行動を調べました。気流刺激は触角ではなく,腹部にある尾葉と呼ばれる別の感覚器官によって検出されるため,もし逃避行動が変化すれば,コオロギが触角で得た空間情報を別の行動に反映させていることになります。実験の結果,コオロギは物体の形や位置,向きによって逃避行動の進路を変えました。その進路は障害物との衝突を避けるようにカーブし,特に前に壁を置いた場合は,進路が変わるだけでなく,反応までに時間がかかり,逃げる距離が短くなりました。
以上の結果から,コオロギは触角を使って周囲の障害物の配置や向きなどの空間配置に合わせて,別の感覚刺激によって生じる行動を変化させることがわかりました。これは昆虫が触角を介して周囲の空間を「認識」している,言い換えれば「イメージ」していることを示唆する初めての報告です。
本研究成果は,2022年2月25日(金)午前8時にJournal of Experimental Biology誌にオンライン掲載されました。
論文名:Spatial perception mediated by insect antennal mechanosensorysystem(昆虫の触角機械感覚システムによる空間知覚)
URL:https://journals.biologists.com/jeb/article/doi/10.1242/jeb.243276/274092/Spatial-perception-mediatedby-insect-antennal
詳細はこちら
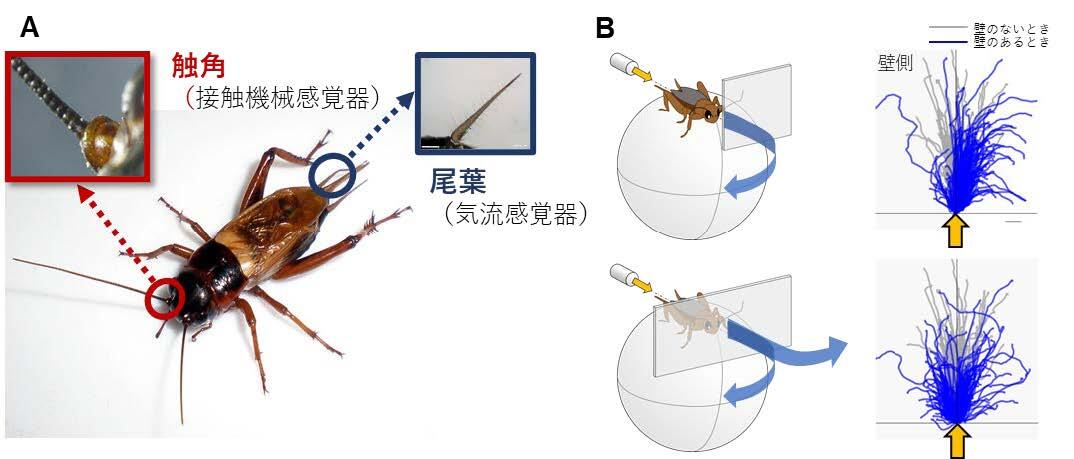
コオロギの機械感覚器官と逃避行動の変化 A:コオロギの触角器官と尾葉器官。B:コオロギの前に壁を設置したときの逃避行動進路。上は左半分に,下は中央に壁を設置した場合。壁がない場合は直進するが(グレー),上では壁と反対側に,下では左右のどちらかに軌跡(青)がカーブする。

