


















2025年1月30日
北海道大学
東京大学
大阪公立大学
ポイント
●ブラシの動き、速度、力、滑りを検知可能なスマートブラシシステムを実現。
●対象物の表面状態を検知可能。
●匠の技術伝承やロボットへの適用などデジタル化へ期待大。
概要
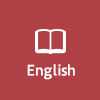
北海道大学大学院情報科学研究院の竹井邦晴教授、東京大学大学院情報理工学系研究科の中嶋浩平准教授、大阪公立大学大学院工学研究科の本田智子研究員らの研究グループは、ブラシ構造に圧力センサを搭載させ、その出力を機械学習の一種であるリザバーコンピューティングで解析することでブラシの動き、速度、力、滑り、そして対象物の表面状態を同時検出するスマートブラシシステムを初めて開発しました。そして本スマートブラシシステムを用いて、数字の執筆をデータ化できることを実証しました。特にブラシが対象物表面を「滑る」情報を初めて検出することにより実現できたものです。また、このブラシの様々な動き情報に加え、対象物表面の状態を検知することができ、匠が表面状態に応じて変化させるわずかなブラシの動きなどもデータ化できる可能性を示すことができました。今後、本センサシステムをさらに発展させることでブラシや研磨などの匠の技術をデータ化することができ、それをロボットや若手にデータベースで伝承することが期待できるものです。
なお、本研究成果は、2025年1月30日(木)公開のScience Advances誌に掲載されました。
論文名:Flexible electronic brush: real-time multimodal sensing powered by reservoir computing through whisker dynamics(フレキシブル電子ブラシ:ウィスカーダイナミクスをリザバー解析することで実現する常時、マルチモーダルセンシング)
URL:https://doi.org/10.1126/sciadv.ads4388
詳細はこちら
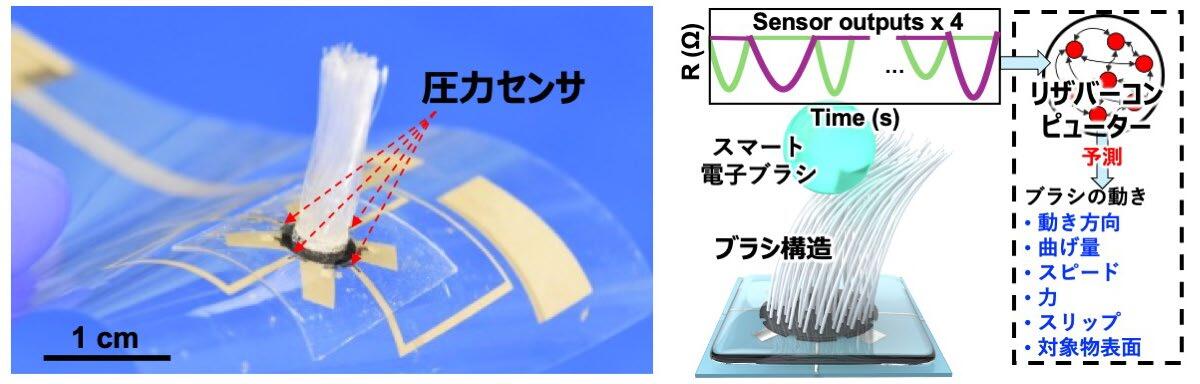
開発したスマートブラシシステムの写真とその解析プロセス

